Internals of module_init and module_exit
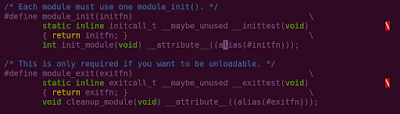
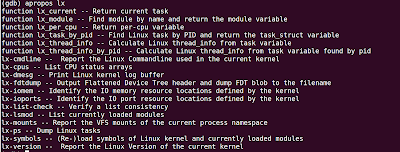
We know from our hello world device driver program , that on insmod, the function passed in the module_init macro is called, and on rmmod, the argument passed in the module_exit is called. Let's see the definition of this macro, it is present in linux/module.h The purpose of defining __inittest function is to check during compile time, the function passed to module_init() macro is compatible with the initcall_t type. initcall_t is defined in linux/init.h: typedef int (*initcall_t)(void); If you declare module_init function which returns void instead of int, the compiler will throw warning: Loading this module generated an oops message. The last line uses the alias attribute of gcc to assign another name to init_module, so that you can have a better name as per your driver (e.g. cdrom_init instead of init_module), instead of each driver having init_module. Same is the case with module_exit, giving whatever name in module_exit as parameter to cleanup_m...