Blinking LED on Lillypad Arduino
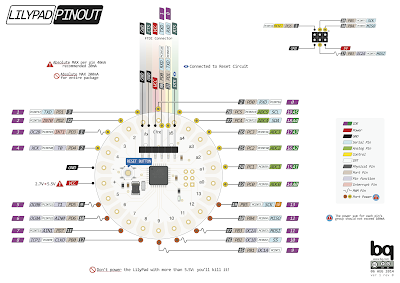
1. Connect VCC,GND of FTDI board to Lilypad 2. Connect RX of FTDI Board to TX of Lilypad 3. Connect TX of FTDI Board to RX of Lilypad as per the below diagram 4.Open Arduino IDE. Files->Examples->Basic->Blink. 5. Select proper serial port and set Board to Lilypad Arduino (Atmega328p) 6. Burn the program. If you get the following errror: avrdude: stk500_recv(): programmer is not responding Press Reset Button while programmer is running.