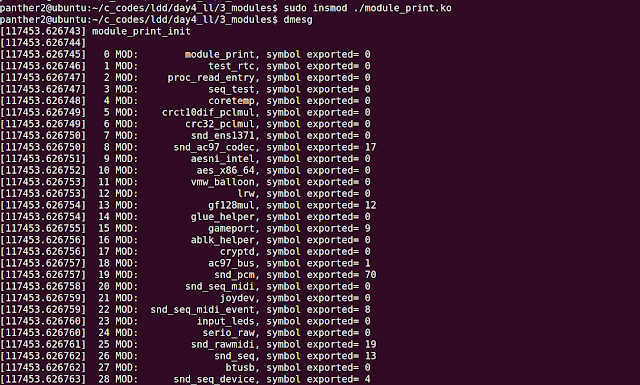
Linux Driver Code to print machine name, system name, release and Version

init_uts_ns(init/version.c) variable in Linux Kernel contains the information about: Operating system name (e.g., "Linux") Operating system release (e.g., "2.6.28") Operating system version Hardware identifier When you run 'uname' command from user space, values from above structure are retrieved. Code Output: